Problemstellung
Technologische, gesellschaftliche und wirtschaftliche Veränderungen erfordern eine Transformation der Produktionsprozesse im Automobilsektor mit Fokus auf Digitalisierung entlang horizontaler und vertikaler Prozesse sowie flexiblen, adaptiven Produktionsressourcen. Roboter bieten Potenziale in den Bereichen Flexibilität, Verfügbarkeit, Produktivität und Qualität. Sie gelten als zentrale Technologie für kooperative sowie teil- oder vollautomatisierte Produktionsumgebungen. Zudem tragen sie zur Stärkung und Verkürzung von Lieferketten sowie zum Reshoring und Ausbau der Produktionskapazitäten in der EU bei. Der wirtschaftliche Einsatz von Robotik in flexiblen Produktionsumgebungen mit sensorgestützten Anwendungen wird jedoch durch die hohe Komplexität solcher Projekte behindert. Diese Projekte umfassen unterschiedliche Phasen wie Planung, Programmierung und Inbetriebnahme, die jeweils spezifische Expertisen und individuelle Herausforderungen erfordern. Aktuell fehlen integrierte, digitale Werkzeugketten, die den Automatisierungsprozess mit Robotern ganzheitlich unterstützen. Stattdessen dominieren Werkzeuge, die auf konventionelle Automatisierung ausgerichtet sind und signifikante Lücken für roboterbasierte Produktionssysteme aufweisen. Diese Lücken sollen durch VADER geschlossen werden.
Zielsetzung
Das übergeordnete Ziel des Vorhabens ist die Konzeption, Entwicklung und Erprobung eines digitalen Assistenzsystems (VADER) für die datengetriebene Automatisierung industrieller Produktionsprozesse mit Robotern. Die vom entwickelten Assistenzsystem umgesetzten Assistenzfunktionen decken die gesamte Kette von der Planung bis zum Betrieb flexibler roboterbasierter Produktionssysteme ab. VADER stellt hierbei unter Betrachtung von Standards wie GAIA-X und CATENA-X einen gemeinsamen Satz von Algorithmen und Datenstrukturen für die Umsetzung und die Inbetriebnahme robotischer Produktionssysteme bereit. Im Sinne der Software-as-a-Service Mentalität werden Dienste entwickelt, welche menschlichen Entscheidungsträgern, Anlagenplanern und Werksarbeitern über intuitive Mensch-Maschine-Schnittstellen oder Drittkomponenten in vernetzten digitalen Produktionssystemen Zugriff zu Daten oder Algorithmen ermöglichen.
Vorgehen
Die entwickelten Algorithmen und Verfahren werden in eine modulare, skalierbare Softwarearchitektur überführt und unter Einsatz offener Schnittstellen- und Plattformtechnologien wie GAIA-X und CATENA-X umgesetzt. Unter Einsatz der entwickelten Softwaretechnologien werden drei Anwendungsfälle im Kontext der Produktion von Komponenten für Antriebsstränge von nachhaltigen Fahrzeugen bei dem Projektpartner ZF umgesetzt.
Das Projekt wurde hierfür in die folgenden Arbeitspakete untergliedert:
AP1 Analyse: Ziel ist es, durch die systematische Analyse des Produktionsumfelds, bestehender Vorarbeiten und Anwendungsfälle sowie Randbedingungen, funktionale und nicht funktionale Anforderungen abzuleiten.
AP2 Softwareinfrastruktur für Assistenzdienste: Ziel ist eine einheitliche Struktur für Datenhaltung, Wissensextraktion/-rückfluss sowie die Bereitstellung von Assistenzfunktionen als Dienste (im Sinne von Software-as-a-Service (SaaS)). Die Umsetzung basiert auf Containertechnologien und ermöglicht ein Aufsetzen in der Cloud, um Datensouveränität sicherzustellen.
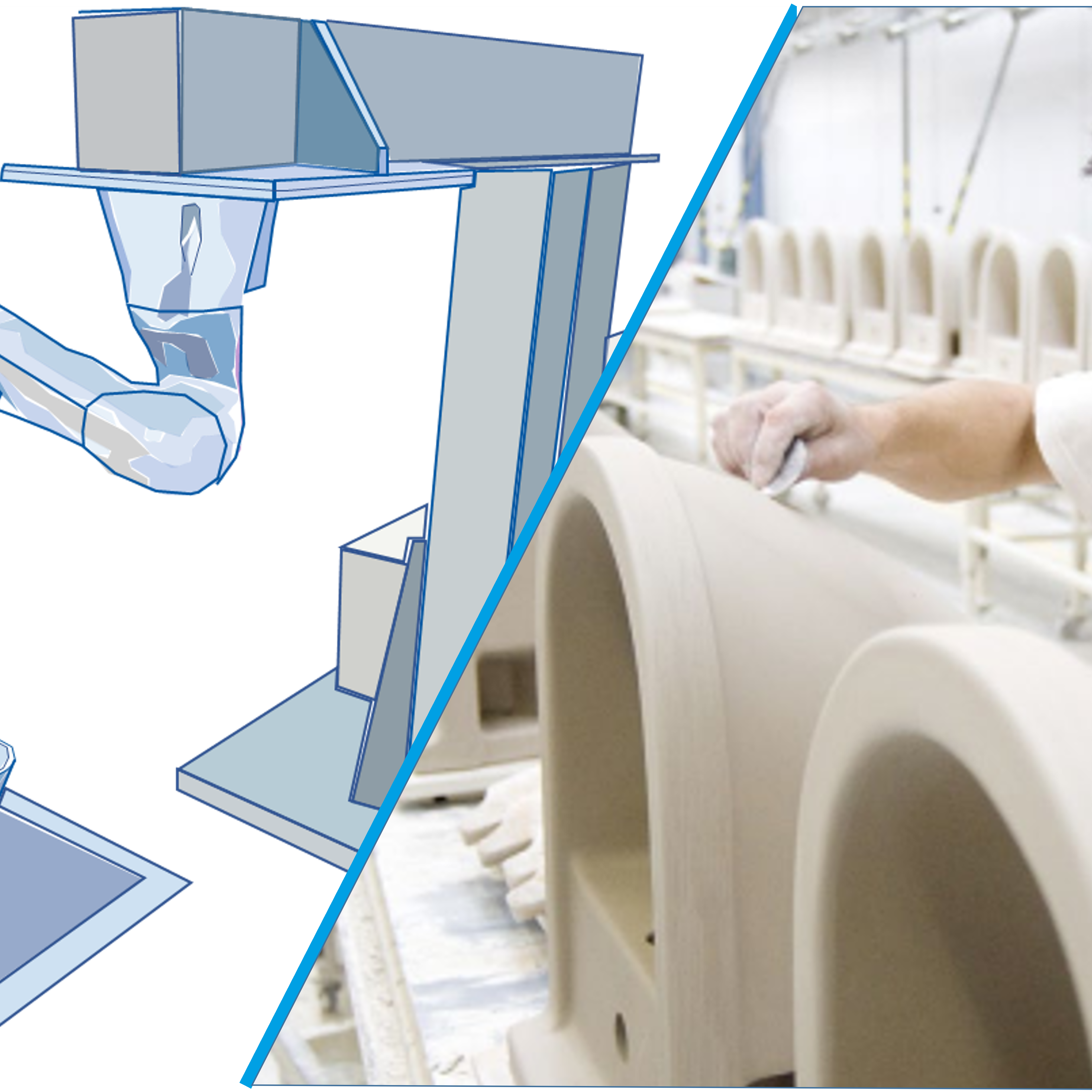
AP3 Assistenzdienste – Roboterfähigkeiten: Ziel des APs ist die Entwicklung von Roboterfähigkeiten und deren Bereitstellung als Dienste. Konkret werden die Fähigkeiten für die betrachteten Szenarien Bin Picking, Sensitives Fügen und Qualitätsprüfung umgesetzt, wobei die Lösung auf Erweiterbarkeit ausgelegt ist. Folgende Dienste sollen konkret umgesetzt werden: Assistenzdienst zur Generierung synthetischer Daten, Assistenzdienste für Objekterkennung/-klassifikation, Assistenzdienste für die Roboterkalibrierung, Assistenzdienste für die Kalibrierung von externen Modulen, Assistenzdienste für die Modell-/Reglerparametrierung sowie Assistenzdienste für Bahnplanung
AP4 Assistenzdienste – Ingenieurfähigkeiten: Ziel von AP4 ist die Erarbeitung von Assistenzfunktionen für die Prozessplanung, Zellenauslegung sowie die Roboterprogrammierung und Einbindung der Peripherie.
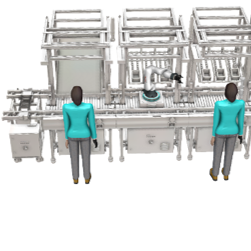
AP5 Assistenzdienste – MRK-Fähigkeiten: Die in AP3 entwickelten Roboterfähigkeiten werden hier erweitert, um explizit die Herausforderungen von MRK-Anwendungen zu adressieren. Folgende Dienste sollen konkret umgesetzt werden: Assistenz bei der Erstellung von Interaktionskonzepten, Assistenz bei der Modellbildung sowie Assistenz bei der Erstellung von Sicherheitskonzepten für den Schutz von Menschen.
AP6 Evaluierung in den Anwendungsszenarien: Ziel dieses APs ist die kontinuierliche Validierung und Weiterentwicklung der in AP3-AP5 entwickelten Assistenzsysteme.
Das Projekt wurde hierfür in die folgenden Arbeitspakete untergliedert:
AP1 Analyse: Ziel ist es, durch die systematische Analyse des Produktionsumfelds, bestehender Vorarbeiten und Anwendungsfälle sowie Randbedingungen, funktionale und nicht funktionale Anforderungen abzuleiten.
AP2 Softwareinfrastruktur für Assistenzdienste: Ziel ist eine einheitliche Struktur für Datenhaltung, Wissensextraktion/-rückfluss sowie die Bereitstellung von Assistenzfunktionen als Dienste (im Sinne von Software-as-a-Service (SaaS)). Die Umsetzung basiert auf Containertechnologien und ermöglicht ein Aufsetzen in der Cloud, um Datensouveränität sicherzustellen.
AP3 Assistenzdienste – Roboterfähigkeiten: Ziel des APs ist die Entwicklung von Roboterfähigkeiten und deren Bereitstellung als Dienste. Konkret werden die Fähigkeiten für die betrachteten Szenarien Bin Picking, Sensitives Fügen und Qualitätsprüfung umgesetzt, wobei die Lösung auf Erweiterbarkeit ausgelegt ist. Folgende Dienste sollen konkret umgesetzt werden: Assistenzdienst zur Generierung synthetischer Daten, Assistenzdienste für Objekterkennung/-klassifikation, Assistenzdienste für die Roboterkalibrierung, Assistenzdienste für die Kalibrierung von externen Modulen, Assistenzdienste für die Modell-/Reglerparametrierung sowie Assistenzdienste für Bahnplanung
AP4 Assistenzdienste – Ingenieurfähigkeiten: Ziel von AP4 ist die Erarbeitung von Assistenzfunktionen für die Prozessplanung, Zellenauslegung sowie die Roboterprogrammierung und Einbindung der Peripherie.
AP5 Assistenzdienste – MRK-Fähigkeiten: Die in AP3 entwickelten Roboterfähigkeiten werden hier erweitert, um explizit die Herausforderungen von MRK-Anwendungen zu adressieren. Folgende Dienste sollen konkret umgesetzt werden: Assistenz bei der Erstellung von Interaktionskonzepten, Assistenz bei der Modellbildung sowie Assistenz bei der Erstellung von Sicherheitskonzepten für den Schutz von Menschen.
AP6 Evaluierung in den Anwendungsszenarien: Ziel dieses APs ist die kontinuierliche Validierung und Weiterentwicklung der in AP3-AP5 entwickelten Assistenzsysteme.
Verwertungskonzept
Verwertungsschwerpunkte des Lehrstuhls für Montagesysteme sind Forschungstransfer und die Qualifizierung von Ingenieurnachwuchs. Der Lehrstuhl hat im Saarland (Fokus Automotive und Maschinenbau) und der Großregion (Saar-Lor-Lux) verschiedene Transferaktivitäten etabliert, sodass mittel- und langfristig, also 2-5 Jahre nach Projektabschluss, regional und überregional produzierende Unternehmen von den Ergebnissen profitieren können. Dazu gehören die Aktivitäten des Mittelstand-Digital Zentrums Saarbrücken und European Digital Innovation Hub Saarland, die in der Region ansässige KMU bei der Digitalisierung und dem Einsatz von KI unterstützen.

Kontakt: